PID Feedback Control
Use settings defined in hardware to perform feedback on a monitored quantity.
This plug-in relies on the
simple-pid(v2+) library. Install it (don’t forget toconda activate scopefoundryif necessary):pip install simple-pidAdd
PIDFeedbackControlto your app:# fancy_app.py from ScopeFoundry import BaseMicroscopeApp class FancyApp(BaseMicroscopeApp): name = "fancy_app" def setup(self): from ScopeFoundry.controlling import PIDFeedbackControl self.add_measurement(PIDFeedbackControl)Refer to the following figure to define the control:
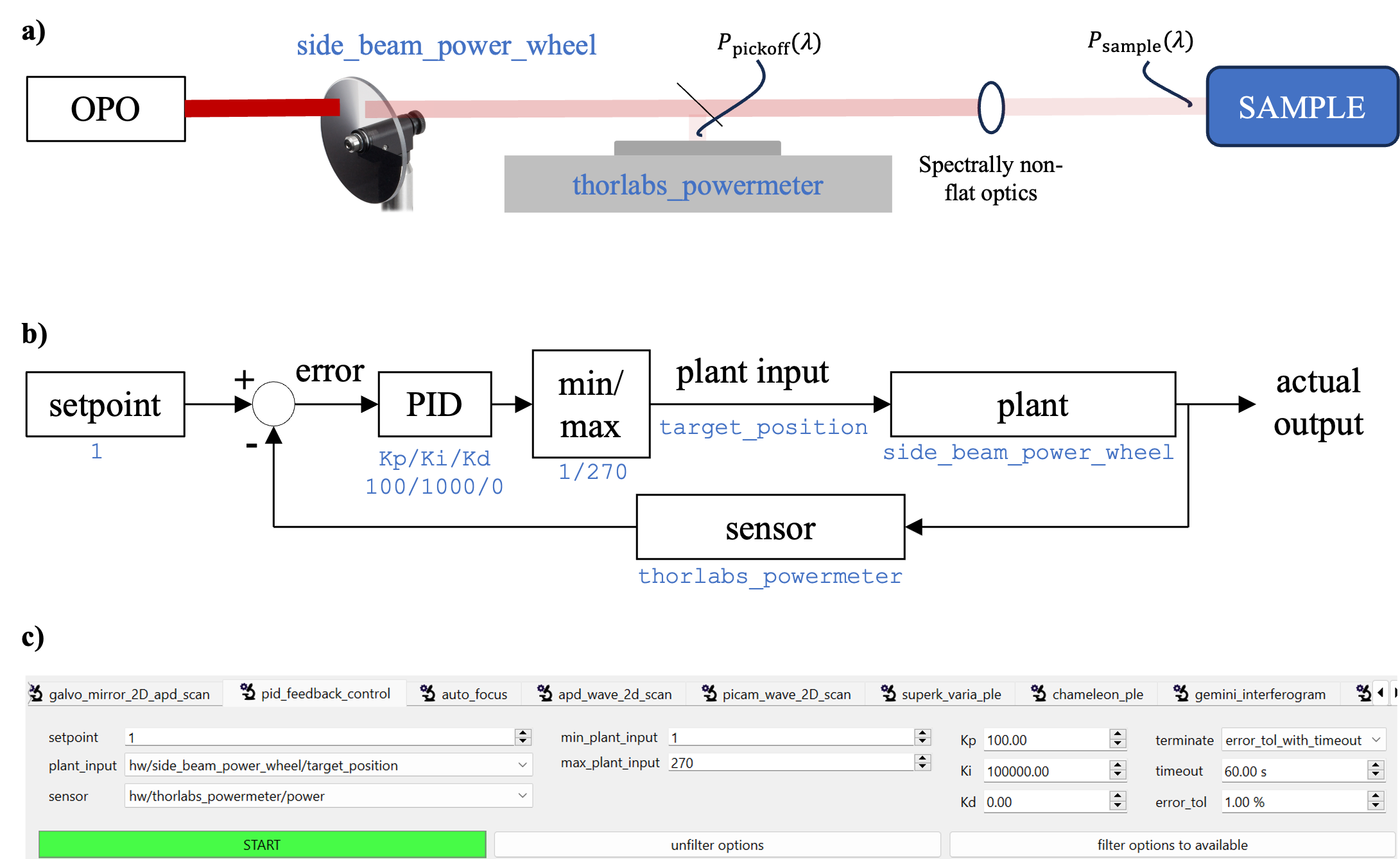
a) The system used in this example: a laser beam from the OPO is controlled by a motorized ND filter wheel (“Plant”). The power of the laser beam is monitored at a pickoff location using a power meter (“Sensor”). (Ignore the rest of figure a).)
b) Control loop diagram. It is a standart PID feeback control except that the range of input to the plant are constrained (min/max block).
c) The GUI of
PIDFeedbackControl:- Define the setpoint.
plant_input(position of the motor of the ND filter wheel,side_beam_power_wheel).sensoris the power readout of a power meter (thorlabs_powermeteras a sensor) by moving an ND density filter wheel (as the plant).- The PID controller with the usual 3 parameters.
- Note that the input to the plant can be constrained by (
min_plant_input,max_plant_input). - Lastly, you can define when the measurement terminates.